Dieses Selbstbauprojet sollte mir helfen, einen Weg fürs „Bauen auf Augenhöhe“ zu finden. Damals hatte ich meinen jugentlichen Leichtsinn regelrecht forciert und wollte mit positiven paktischen Beiträgen für eine bessere Welt sorgen. Weil ohnehin nur jeder bei sich selber beginnen kann, fing ich einfach mit meinem Primitivwerkzeug im ehemaligen Kohlenkeller einer Bekannten an.
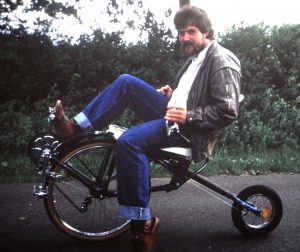
KALLE-1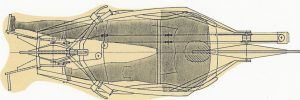
Mein erstes Liegefahrrad 1988 in Hamburg auf einer Erfinderausstellung. Mit Schwenkhebel und Linearantrieb
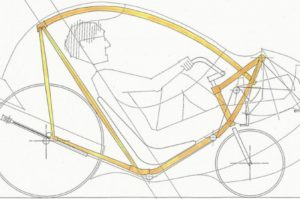
Das KALLE-2 war einfach nur eine Skitze
Damals bin ich ziemlich viel mit dem Fahrrad gefahren und mir ist es wohl wie jedem gegangen: Die Autos waren mir viel zu laut. Als ich einmal ratlos auf einer Autobahnbrücke über den Straßenlärm nachdachte, vernahm ich gar nicht so stark den Motorenlärm, sondern eher die Abroll- und Verwirbelungsgeräusche der vorbeifahrenden Autos. Ich stellte mir vor, was passieren würde, wenn Zweiradfahrzeuge plötzlich ein kleines Heckrad einklappen würden und nur noch als Mono fahren.

Was würde passieren, wenn verkleidete Motorräder ab beispeilsweise 100km/h nur noch dank stromlinienförmiger Karosserie durch ein Leitwerk gesteuert würden? Durch einen besseren CW-Wert und weniger Reibung würden viel sparsamere Motoren ausreichen.
Natürlich ist das nur eine exotische Vorstellung, aber sie zeigt, mit welchen Maßnahmen bereits der Individualverkehr viel ökonomischer werden könnte. Diese Idee war jedoch der Grundgedanke für meine KALLE-3 Serie, an dem ich bis heute hängen geblieben bin, weil mich einfach fasziniert hatte, vie viel Spaß aufeinmal Fahrradfahren machen kann. Durch diesen Impuls damals auf der Autobahnbrücke bin ich auf ein völlig neues Lenksystem beim Zweirad gestoßen.
Aber wie so etwas nun gelenkt werden muss, war mir damals völlig schleierhaft. Ich musste viel rumtüfteln, bis ich eine einigermaßen funktionsfähige Geometrie gefunden hatte.
 eine erste Skizze
eine erste Skizze

Uni-Plot 1997
Der Plot der Uni Oldenburg, Arbeitsgruppe Fahrradforschung 1997, vom KALLE-3e zeigt einen größeren stabilen Bereich als beim Hollandrad, allerdings sind aufgrund der kleineren Räder erst ab höheren Geschwindigkeiten selbststabilisierende Effekte vorhanden. Mit dem Hollandrand kann also bequemer langsam gefahren werden. Dennoch ist langsames Fahren auch mit dem Kalle problemlos möglich, dafür hat man zusätzlich eine unglaubliche Wendigkeit. Man fühlt sich so frei wie in einem Hubschrauber zwischen den Lenkhebeln, weil sich vor einem kein Lenker befindet und hat sofort die Füße unten. Für mich hat dieses Fahrwerk regelrecht Suchtfaktor und vor allem trainiert es hervorragend, weil der Fahrer ganz anders, eingespannt zwischen Rückenlehne und Pedal seine Kräfte einbringen kann.
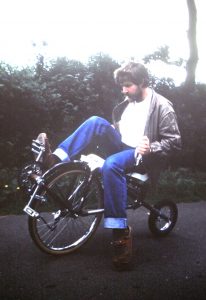
Meine ersten Fahrversuche auf dem KALLE-3a
Angefangen hatte ich meine ersten Rahmenversuche in meiner neuen Werkstatt am Kurt-Schumacher-Damm in Berlin direkt neben dem Zaun des Flughafen Tegel und der Tunnelausfahrt der Stadtautobahn in einem ehemaligen Kindergarten. Damals 1990 nach dem Fall der Mauer waren einfach keine geeigneten Wohnungen zu bekommen. Deswegen zogen wir an den absoluten Unort. Unsere Besucher mussten sich draußen wegen des unerträglichen Fluglärms die Ohren zu halten, wohingegen anschließend drinnen die absolute Stille aufgrund der Schallschutzfenster vorherrschte. Erst mussten wir dort eine Total-Tapeten-Sanierung durchführen und dann galt es die 80m ²-Einzimmer-Wohnung mittels Raumteiler zur Wohnung umzugestalten. Die große Abstellkammer mit Austritt auf die Terrasse wurde Werkstatt.
Dort baute ich meinen ersten Hecklenker. Das heißt ich wusste damals noch gar nicht, dass meine Lenkgeometrie so bezeichnet wird. Es war mir auch egal. Ich wollte lediglich meine oben skizzierte Idee bauen und ausprobieren. Irgendwie schaffte ich es dann, einen Rahmen so zu schweißen, dass er tatsächlich mein Gewicht aushielt. Dann kam eine Lenkung mit damals noch viel zu komplizierter Mimik. Aber das Rad ließ sich überhaupt nicht fahren.
Das Unikum mußte doch irgendwie fahrbar sein dachte ich. Eine Geige kann schließlich ja auch niemand auf Anhieb spielen tröstete ich mich. Also machte ich mir eine Strichliste und durchquerte unsere Einraumwohnung von einer Fensterseite im Norden zur Fensterseite im Süden, wo draußen unser Gewächshaus auf der Terrasse direkt vorm Fenster stand. Damals glaubte ich, die schlechte abgasbelastete Luft der startenden Flugzeuge, die regelmäßig als Kerosinwolke bei Westwind in unsere Wohnung waberte durch Luftfiltertechnik in den Griff zu bekommen. Zu mindestens unser Blick auf die Pflanzen war ganz hübsch, richtig luftdicht bekommen hatte ich die Wohnung all die Jahre jedenfalls nie, weil meine Fahrradentwicklung stets im Vordergrund stand. Ursprünglich glaubte ich mit Überdruck und Aktivkohle durch gezielten Technikeinsatz den Unzustand beheben zu können.

Rahmen KALLE-3b auf unserem Kunstrasen im Wohnzimmer
Eigentlich fand ich den Rahmen auch ganz hübsch mit seinen Hartlotnähten auf unserem quietschgrünen Kunstrasenteppich als Auslegware im Wohnzimmerbereich. Jetzt wollte ich es wissen und begann mit meinen Fahrversuchen. Es waren bestimmt 2.000 Anläufe notwendig, um die erste Tretkurbelumdrehung zu schaffen, aber ich machte Fortschritte und wurde immer besser. Irgendwann waren ganz viele Umdrehungen am Stück möglich.
Draußen auf der Straße mochte ich nicht üben, weil es mich bestimmt abgelenkt und demotiviert hätte. Ich wollte meinen tiefsten Intuitionen lauschen, weil ich sowieso meiner Umwelt signalisieren wollte, wie unzulänglich sich meiner Meinung nach Bauen auf die Menschen auswirkt, aber mir hörte ja niemand zu. Deshalb versuchte ich es kurzerhand mit ungewöhnlichen Schritten und glaubte so mit einem ganz besonders skurrilen Zweirad die Aufmerksamkeit auf mich zu lenken, um dann die irgendwie verkorkste Welt zu erklären. Das war jedenfalls meine Motivation, die mir half mich mit dieser Realität zu arrangieren. Auf blöde Sprüche hatte ich keine Lust. Also versuchte ich irgendwann draußen nachts im Dunkeln meine ersten Geraden zu fahren und hatte so allmählich den Eindruck, das Fahrrad funktioniert. Kurzentschlossen verlud ich das Gefährt in Utes grünen Golf und wir fuhren nach Schleswig-Holstein zu meinen Schwiegereltern, um dort im Hohner-Wald in Ruhe eine Probefahrt zu probieren.
Irgendwann konnte ich tatsächlich mit höchster Konzentration bei gewaltiger Lenkanstrengung kontrolliert geradeaus fahren. Kurven wurden aber eher nicht gewagt, denn sie endeten sofort im Graben. Das Gute an meiner Sitzposition war, das ich sofort die Füße auf den Boden bekam und schnell vom Fahrzeug wegkam, wenn ich mal umkippte, weil vor mir ja kein Lenker war. Außerdem war die Sturzhöhe, anders als beim Hollandrad viel niedriger und der Aufprallwinkel zur Fahrbahn war viel geringer. Dieses Gefühl erhöht enorm das Sicherheitsempfinden.
Zurück in Berlin baute ich den Rahmen um, probierte diverse Lenkachsenwinkel und mehrere Positionen des Steuergelenkes. Das hatte schon ziemlich lange gedauert, aber ich bin ja ein geduldiger Mensch. So kam ich dem Ur-Entwurf tatsächlich irgendwie nahe und das Rad ließ sich wirklich in jede gewünschte Richtung zielgerichtet fahren.

Damals studierte noch mein Vetter Andreas in Hannover Maschinenbau und war selber in einer Fahrradbau-Ini der Hochschule aktiv. Ich besuchte ihn mit meinem Eigenbau und merkte, dass ich die Aufmerksamkeit unter seiner Kommilitonen erregte. Darunter war auch Heiko S., der selber mit einem hinten gelenkten Zweirad experimentierte. Sein Name steht für das „Qilin“. Von diesen Uni-Versuchen wusste ich zuvor gar nichts. Mein Prototyp unterschied sich aber durch eine etwas andere Lenkhebelanordnung und Geometrie. Wie letztlich das Qilin fuhr,wusste ich gar nicht. Allerdings konnte ich mir eine gewisse Nervosität der Lenkung aufgrund der Fotos gut vorstellen, weil ich ja selber diverse Geometrien am eigenen Prototypen getestet hatte. Jedenfalls ist dort zum ersten Mal für mein Liege-Fahrrad der Begriff „Hecklenker“ gefallen.


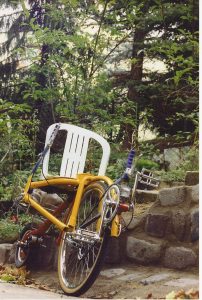
Das KALLE-3e ist eine vollgefederte Weiterentwicklung

Hi, awesome project. Few people can say they contributed something original to the concept of the bicycle, but id say this qualifies!
I was thinking to build something similar, and I had a question about the handlebars. My first idea was to keep it simple and just have a handlebar attached rigidly to the rear section. I suppose its a less natural motion for the arms to initiate turns this way, but is it something you have tried? I can imagine the mechanism as you have it gives additional leverage, which might be important to get the entire mass of the rider to turn quickly enough. Do you find that this is an important consideration; or is the force required to initiate a turn not really an issue in practice?
Thanks!
Obviously there is the inversion of control if done this way; but would that really be that hard to adjust to? I guess for the steering effort it should feel similar to turning yourself with your arms while in an office chair. Probably not ideal for mountain biking and a good arm workout if slaloming; but for normal/commuting use of a bike it seems to me it might be alright. But if you have any direct experience with the question id love to hear about it.
Hallo Kalle
So ein Hecklenker hab ich vor Jahren 2014 mal gebaut, gleiche Lenkachse, aber ich sass etwas höher über dem 26″ Vorderrad und der Lenker war fix mit der Stange zum Hinterrad verbunden, d.h die Lenkausschläge wirkten verkehrt herum. Das war zuerst etwas speziell, aber ging mit etwas Übung ganz gut. Die Massenträgheit zum Lenken war jedoch schon sehr viel höher, was eine langsame Fahrt sehr schwierig machte. Beim stärkeren Bremsen kippte das Rad zudem schell mal nach vorne über, was mit einem Absteigen und nach vorne und weiterrennen endete, wenn es nicht zu schnell war. Ein zweites Gelenk quer zur Lenkachse erlaubte ein aktives Zurückkippen durch ein nach vorne stossen des Lenkers. Diese Schwerpunktwanderung nach hinten verhinderte die Gefahr des nach vorne Kippers und ich konnte den Kippwinkel mechanisch mit der Vorderradbremse verbinden, eine elegante Lösung in der Tat.
Schöne Grüsse
Otto
Hallo Otto,
Du beschreibst, Deine Lenkachse sei ähnlich wie die meiner Geometrien, aber hattest Du auch den gleichen Nachlauf?
Mich erinnert Deine Beschreibung ein wenig an meine ersten Experimente mit dem KALLE-3a (siehe im Beitrag ganz oben), als ich noch mit den verschiedensten Winkelneigungen experimentiert hatte. Deine Idee mit dem Quergelenk zur Neigungsverstellung eignet sich z.B. hervorragend um einen optimalen Nachlauf zu bestimmen. Bei mir war dieses Quergelenk immer die einstellbare Hinterradfederung auf Zug über ein Elastomerelement.
Das KALLE-3c ist fahrtechnisch schon ziemlich brauchbar im Vergleich zum gewöhnlichen Fahrrad. Die Massenträgheit des Fahrers empfand ich ab einer bestimmten Geschwindigkeit immer als stabilisierend für das Lenkverhalten. Das drücken übrigens auch die o.g. Plotts des KALLE-3e aus.
Natürlich sind Langsamfahren und Bremsverhalten immer auch ein Kompromiss, der durch folgende Faktoren vorgegeben ist:
• Bequemes Sitzen im Stand mit beiden Füßen fest auf dem Boden (Sitzhöhe)
• Länge des Hinterbaus bestimmt die Traktion des Vorderradantriebes (Steigungen bei schlechtem Straßenbelag)
• Belastung des Hinterbaus z.B. durch Gepäck bestimmt den Gesamtschwerpunkt (Bremseigenschaften)
• Länge des Hinterbaus bestimmt die Wendigkeit, wobei ein kurzer Radstand zu extrem kleinen Wenderadien und einem super Handling führt.
Im Stadtverkehr fetzt dieses kurze Liegerad am meisten, gerade weil es so agil fährt. Denn hat man es irgendwann drauf, macht diese wunderbare Wendigkeit den einmaligen Fahrspaß überhaupt erst aus. Für den Berliner Raum ohne besondere Transportambitionen und Steigungen bevorzuge ich deswegen lieber einen kurzen Radstand.
Dem Argument, „das Hinterrad hebe zu leicht beim Bremsen ab“, kann leicht mit dem Vergleich zum gewöhnlichen Rennrad begegnet werden. Wie bei meiner KALLE-Geometrie sind schließlich alle Tour-de-France-Profis mit dem ähnlichen Schwerpunktwinkel zum vorderen Radaufstandspunkt unterwegs und legen so größte Distanzen in Minimalzeiten zurück. Nur droht allen diesen Rennradlern leider auch bei Vollbremsung der Überschlag von ziemlich weit oben über den Lenker.
Aus entsprechender Höhe ist allerdings ein Abgang etwas ganz anderes, als bei einem viel niedrigeren Liegefahrrad. Bei mir würden sich zunächst die Füße auf den Boden orientieren und aufgrund der seitlichen Lenkhebel kann sich nirgends der Körper an einem Lenkerteil festhängen. Im Extremfall würde das Gefährt einfach liegen bleiben, während der Fahrer frei nach vorne weiter läuft. Im Vergleich zum Rennrad, bei dem der Kopf als erstes im hohen Bogen über Brems- und Lenkbauteile auf den Boden aufschlägt, sind es bei meinem Liegerad zumindest zuerst nur die Füße, die gefühlt sogar noch eine drohende Kollision abfedern könnten. Dadurch erscheint das Verletzungsrisiko beim KALLE um einiges geringer.
Auf dass niemals etwas schlimmes passieren möge, aber in Anbetracht diverser Sprintkarambolagen im Profiradsport fühle ich mich im Vergleich zu meiner damaligen Rennmaschine subjektiv, trotz des extrem kurzen Radstandes, ziemlich sicher auf meinem Eigenbau.
Wow! Ich hatte vor ein sehr ähnliches Fahrrad zu bauen – auch mit Vorderradantrieb, auch mit dem Sitz fest mit dem vorderen Teil des Fahrrads gekoppelt (damit man nicht mit den Füßen lenken muss), auch mit solchen Lenker, die nie sich ins Bein vom Fahrer bewegen.
Dann habe ich nach Beispiele von solchen Fahrrädern gesucht und das einzige gefunden, die Kalle-Serie. Ich finde das Rad echt genial.
Meinst du, dass eine größere Version von diesem Rad auch gut funktionieren würde? Mit größeren Laufrädern, einem längeren Radabstand, Platz für mehr Gepäck. Ein Kalle, mit dem man gut Reisen könnte. Könnte man das Rad vergrößern, ohne die Lenkgeometrie zu stören?
Ich sehe, dass du über den Jahren die Lenkgeometrie entwickelt und verfeinert hast. Ich würde sehr gerne wissen was, deiner Meinung nach, die Kriterien sind für einen gut fahrbaren Hecklenker. Welcher Lenkachsenwinkel scheint bestens zu funktionieren, Position der Lenkachse, usw. Ich weiß nicht ob du diese Informationen zurückhalten möchtest. Ich frage weil es mir helfen würde wenn ich gleich selber anfange etwas sehr ähnliches zu bauen.
Ich hoffe, dass mein schriftliches Deutsch als Zweitsprache gut verständlich und nicht unhöfflich hervorkommt – bin gebürtiger Briter.
Bester Gruß aus Freiburg
Warum zweifest Du an Deiner Schreibweise. Ich konnte alles gut verstehen, eher muss ich die späte Beantwortung Deiner Fragen entschuldigen.
Die Lenkung so auszulegen, dass Sitz und Tretantrieb eine unbewegliche Einheit bilden, erschien eigentlich logisch. Aber als wesentlicher Vorteil schwebte mir immer die geringe Seitenwindanfälligkeit bei Zweiradfahrwerken vor. Aufgrund der besonderen Geometrie verspreche ich mir eine bessere Stabilität bei Seitenwind, sofern der Rahmen stromlinenförmig mit einer Karosserie umkleidet wird. Trikes verhalten sich bekanntlich bei seitlicher Anströmung gutmütiger als vollverkleidete Liegeräder mit gewöhnlicher Frontlenkeung. Bei körperkraftgetriebenen Fahrzeugen möchte ich aber auch im Falle einer Karosse nicht auf die tolle Möglichkeit verzichten, das Menschen sich überhaupt auf lediglich zwei Rädern fortbewegen können.
Ob da nun große oder kleine Räder, langer oder kurzer Radstand vieleicht sogar lange Ladefläche, dass sind alles Aspekt, für die ich unterschiedliche Rahmen entworfen habe. Orientiert habe ich mich dabei an der Ergonie des Menschen z.B. wenn der Fahrer im Stand bequem die Füße auf den Boden bekommt. Angenehm ist eine Federung, was allerdings aufgrund der Schwingenauslenkung kleinere Radradien bewirkt. Bei mir waren es 20Zoll. 24Zoll beim KALLE-3C fuhren auch sehr gut, aber da war der Rahmen starr. Eine ungefederte Sperrholzvariante mit 26Zoll Ballonreifen habe ich momentan in der Planung. Alle diese Varianten haben bei mir immer die gleiche Lenkgeometrie bei Lenkkopfwinkel und Nachlauf.
Der Radstand lässt sich doch jederzeit problemlos verändern, indem man einfach den Hinteren Teil auswechselt. Für Reisen ist ohne Probleme eine lange Ladefläche vorstellbar oder Elektro.
Hi There! Are you still working on the cool Kalle project?
yes of corse. I describe it later. Look again on theese sites. Best wishes HU Reimers